
隨著自動駕駛算法等級的不斷提供,各開發商的傳(chuan) 感器布置方案也越來越豐(feng) 富,最典型的為(wei) 多V、多R及多L的方案。而在多種類,多數量的傳(chuan) 感器進行物理模型仿真時,會(hui) 占用大量的計算資源和網絡通訊資源,同時仿真的效果還受到PCIe總線及顯卡的接口數量限製。

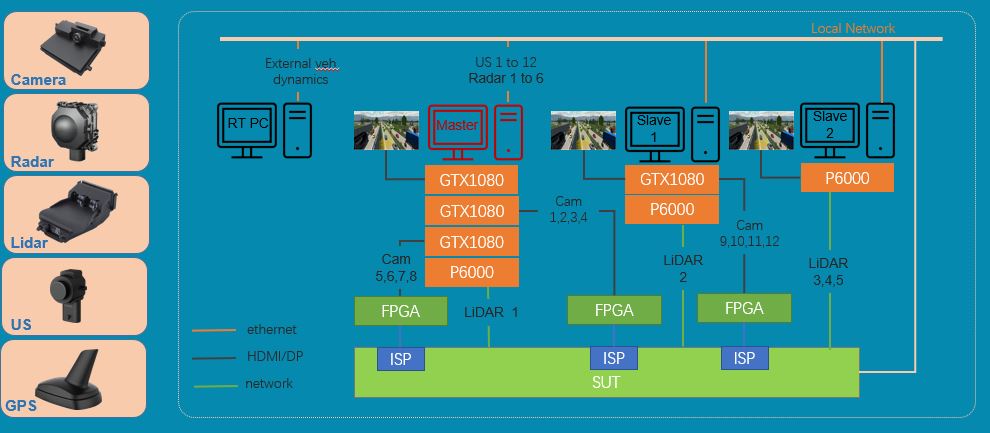
基於(yu) VTD的多物理傳(chuan) 感器自動駕駛係統仿真方案,采用VTD的主從(cong) 機布置方式,將VTD軟件安裝在主機Master上,從(cong) 機slave上隻安裝運行VTD所需要的依賴,主機以mount的方式將仿真軟件映射在從(cong) 機Slave相應的位置。在主機中配置各類型傳(chuan) 感器運行的顯卡平台,仿真開始時,主機以ssh的方式將傳(chuan) 感器的計算任務下發到從(cong) 機Slave的顯卡,以調用從(cong) 機Slave的計算資源,達到仿真對速度的要求。各個(ge) 計算機的顯卡將計算完成的數據,分別通過HDMI和以太網的數據,發送到視頻注入板(FPGA)或直接發送給被測係統SUT。從(cong) 而在感知層實現全鏈路仿真。
該係統可以滿足用戶:
• 同時進行多路視頻數據的感知算法驗證;
• 同時進行多路激光雷達點雲(yun) 數據的仿真驗證;
• 同時進行多路毫米波雷達點雲(yun) 數據的仿真驗證;
• 可進行多V多R和多L的物理模型仿真驗證;
• 可進行行泊一體(ti) 的算法仿真驗證。
完善信息後我們(men) 將會(hui) 盡快與(yu) 您取得聯係,並將資料發送至您的郵箱。感謝您對华体汇官方网站的支持。







